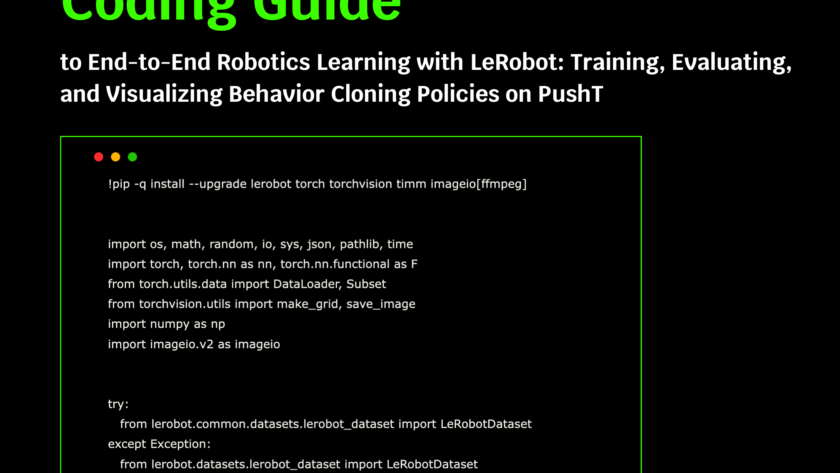
In this tutorial, we walk step by step through using Hugging Face’s LeRobot library to train and evaluate a behavior-cloning policy on the PushT dataset. We begin by setting up the environment in Google Colab, installing the required dependencies, and loading the dataset through LeRobot’s unified API. We then design a compact visuomotor policy that…